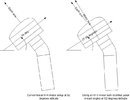
Dovercat, I've made a diagram of a traditionally set up polar mount (situated in London) so you (and anyone else) can easily see what we are talking about. The satellite on the right of the drawing is the due south satellite and the satellite on the left is the due north satellite (which obviously is below the horizon). All the figures are in degrees or kilometres (so anyone who is interested can check/correct them). If you look at the southern satellite you will see that the angle between the orbital plane and pointing up towards London is 7.37º. This is the declination angle for that latitude. In a traditional setup the motor is set at 0º (i.e. motor axis is parallel to the Earth's polar axis) and the declination is dealt with at the dish, so the declination between the dish and the motor axis is set at 7.37º. Ok, so now we have perfect alignment on the southern satellite.
Now lets look at the northern satellite. The dish is still fixed to the motor shaft (motor axis) with 7.37º declination as this is a static fastening. If we send the motor round 180º it will point due north but still be pointing downwards with 7.37º declination. Oh dear, now we have a problem because according to the figures we require 6.11º declination for that satellite. How is this corrected? Simple, tilt the motor axis forward towards the south by 0.63º (0.63º less motor elevation) and set the declination between the dish and motor to 6.74º.
Now lets look at how that works:
Southern satellite, 6.74º + 0.63º = 7.37º. Perfect alignment.
Northern satellite, 6.74º - 0.63º = 6.11º. Also perfect alignment.
Ok, so with the "modified" setup we have perfect tracking right across the arc, but is there any problem with this system? Well yes there is, the maths is a lot more complicated than "90º - latitude"...
")